









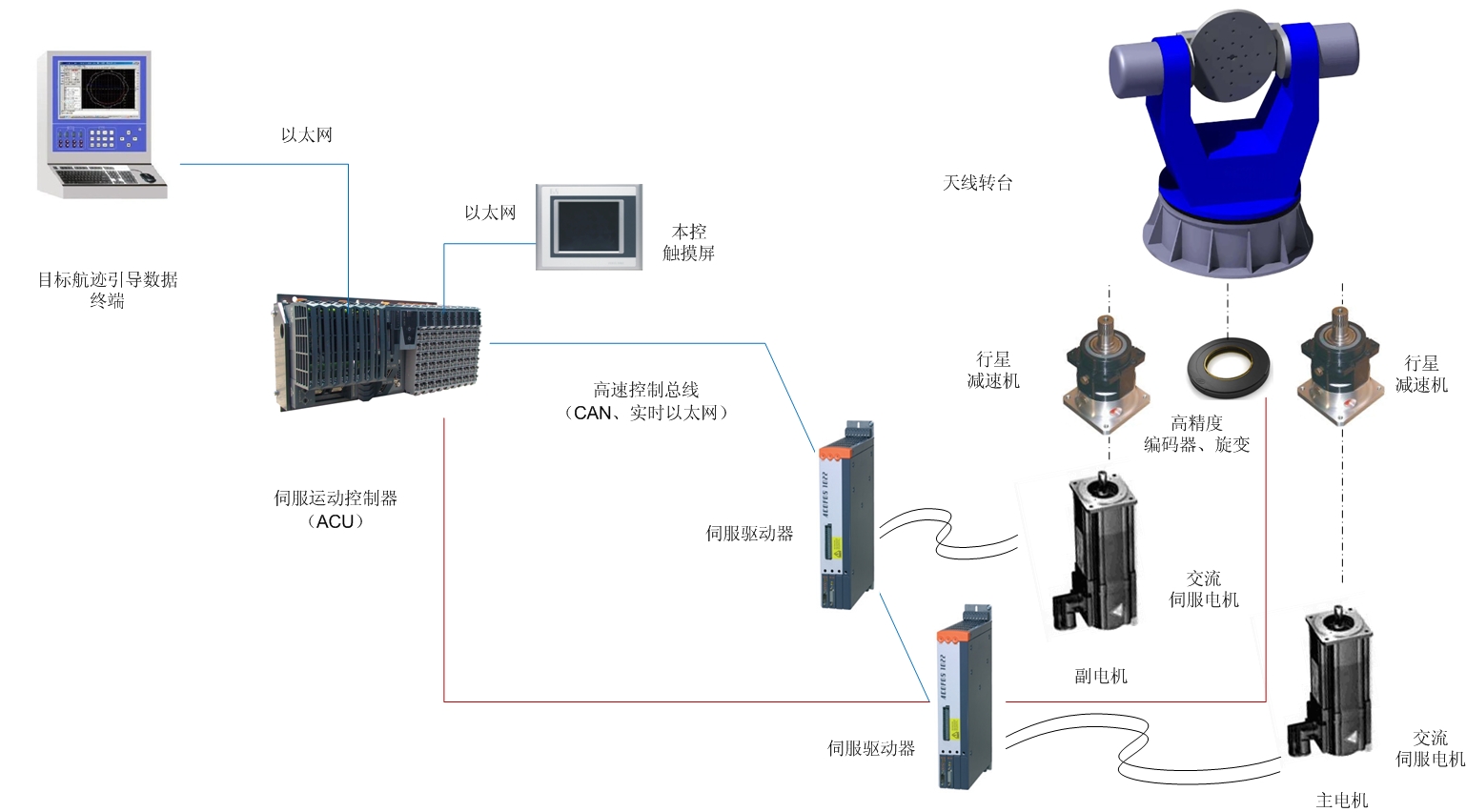
我公司在贝加莱智能型伺服(ACOPOS)和可编程计算机控制器(PCC)高速运算处理能力的平台上,实现了雷达伺服系统方位高精度跟踪的全套解决方案,并采用双电机协同的方式,克服了雷达天线伺服系统传动结构上的固有的回差间隙。
本系统具体的特点如下:
1. 采用转台大盘上的高精度编码器与伺服电机编码器(旋变)相结合的控制方式,精确有效的实现了雷达伺服系统实时位置控制。
2. 双电机消隙:使用两台控制电机消除转盘齿轮结构上存在的齿隙,避免静止时因外力(如风力)导致的位置偏移。采用全方位平衡(速度、位置、力矩)的工作模式,实现方位跟踪上既有高速准确性,又有平稳流畅性。
3. 高响应的位置带宽:采用微秒级带宽的伺服双闭环位置控制模式,具有极高的快速响应性和精度。
4. 高效精确的运动算法:本系统采用了可变速度的运动控制算法,根据距离偏差计算运动的速度,从而大大缩短了系统的定位时间和准确性,为用户实现高精度、快速的定点引导,数字引导和动态跟踪提供了保证。
5. 系统全部部件均按军温环境条件设计,满足宽温,三防,冲击振动等多项严酷环境指标要求。
该系统在跟踪精度上的主要性能指标:
定 位 精 度 : < 0.002°
实时跟踪精度: < 0.002°
通过航迹捷点(过顶): < 0.02~0.3°(100m/s~300m/s目标航速)


 备案号:
备案号:
