双电机消隙高精度跟踪系统

本系统具体的特点如下:
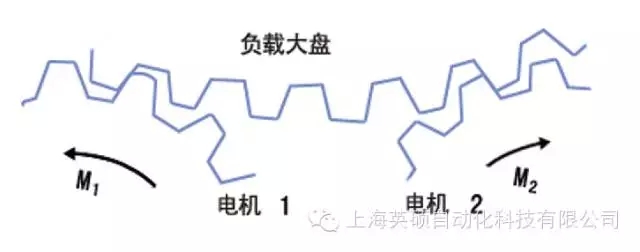
1. 双电机消隙:采用两驱动负载频繁换向等系统问题,而采用双电机驱动消隙方法可以有效地解决由间隙造成的瞬态误差套伺服驱动系统共同均匀推动负载,每台电机承担1/2负载,可以选择较小容量的伺服驱动器和伺服电机;特别是对于高精度、高速随动系统和伺服电机。
2. 高效精确的运动算法:本系统采用了以负载编码器为主反馈的控制策略,避免结构传动误差,实时精确反映负载的实际位置,采用的独特跟踪算法,具有极高的毫秒级快速响应性和精确性,为用户实现高精度、快速的定点定位,和动态跟踪提供了保证。












 备案号:
备案号:
