









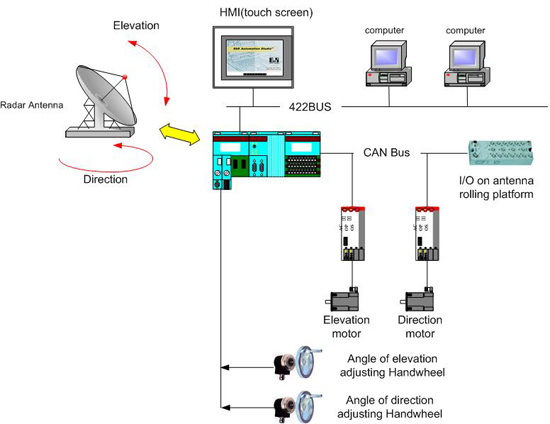
我公司采用贝加莱公司的可编程计算机控制器(PCC)和伺服系统(ACPOS),运用目前欧美比较流行的CAN总线技术,为雷达伺服系统提供了包括俯仰、方位的全套解决方案。此外本系统成功的将原本只有在嵌入式系统中实现的运动算法移植到PCC控制器中,从而大大提高了系统的效率和精度。本系统具体的特点如下:
1.高效精确的运动算法:本系统采用了可变速度的运动控制算法,根据距离偏差计算运动的速度,从而大大缩短了系统的定位时间,同时满足了用户对定位精度的要求。
2.定时运动:系统可以根据用户的要求在某一时刻运动到某个点。
3.精确的实时钟:系统可以根据GPS的时钟来自动矫正自己的系统时间,保证时间误差在用户允许的范围。
4.运动轨迹推算:系统可以根据之前的运动速度和位置,推算出未来一段时间内系统的运动速度和位置。
5.操作灵活方便:本系统不仅可以根据上位机的要求进行俯仰和方位的动作,而且还可以通过手轮进行手动的操作。


 备案号:
备案号:
