









英硕公司成功研发出了具有6,8,10条支腿的多点大型平台的机电调平系统,该系统在试验样机上取得了十分理想的工作效果,系统具有下列明显性能特点:
1) 调平速度快,精度高,实测数据表明,支腿从撤收位置开始架设与自动调平,全部时间不超过2分钟(与工作行程有关),水平调节精度可达到45角度秒之内,这样的指标对于长约10米,宽约3米的平台面来说,无疑是可以称道的。实际上,高精度的控制效果完全依赖于科学而精密的控制算法,在整个调整的过程中,平台支腿的标称速度是按照下面的规律变化的:
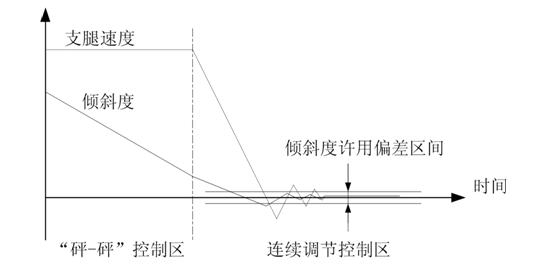
简而言之,科学合理的控制策略可以保证支腿的运动速度和倾角同时收敛与稳定状态。
2) 支腿抓地稳定无“虚腿”,且结构受力分布均匀可调控,在多点支承的调平系统中,我们在业内率先实现了支腿受力分布的调控工作模式,这使得支腿触地更加可靠和快速,且在调平后可在保证水平度的前提下,实现各支腿的受力均匀化的调控。
3) 调平的最终中心高度具有极好的可重复性,同时,在同一中心高度位置上,系统不仅可以重复多次进行立即调平,且可实时自动校正由于外界扰动因素引起的水平度的漂移。
4) 支腿运动副具有完备的多重保护:
a) 电气限位保护,由电气限位开关实现;
b) 软件限位保护,由伺服电机的相位计算实现;
c) 安全力矩保护,由电机工作的保护力矩设定实现;
5) 系统人机界面友好,可实时显示XY轴水平度,每个支腿的升降运动状态,限位状态,触地状态及错误告警状态等,通过触摸液晶显示屏的使用,更有水平度、受力状况的实时数字显示及历史记录,实现了系统信息的全面可视化。另一方面,手持线控盒与主面板的双人机界面操作,对使用者而言,安全而且方便。
6) 电气设计上高度精简,CAN总线的运用,实现了控制器与伺服驱动器的数字化接入,提供了运动信息的全面监控。
7) 机械结构上采用丝杠与电机安全制动器的双重自锁,使得平面的水平稳定度得以持久保持。
8) 非常情况下,支腿可以手摇低速升降。
电气系统方面,由调平PCC控制器、伺服电机与驱动器、水平倾角传感器以及调平机柜、人机界面、传感器与伺服电机电缆构成;机械机构方面,调平系统的执行机构由电机驱动的调平支腿构成,其结构由丝杠(滑动/滚动)、套筒、支承单元、安装座和电气限位开关等构成。系统如下图所示:
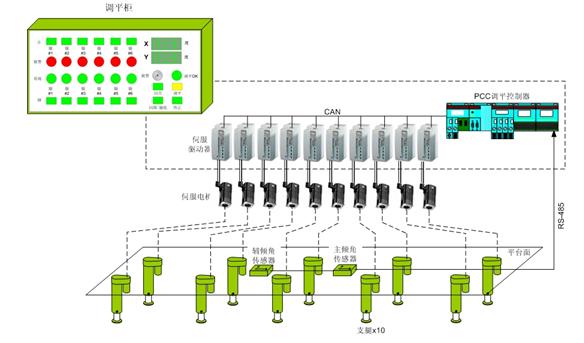
与几何尺寸相对较小的四点调平系统不同的是,该平台上布置了一主一辅两个水平仪,用以实时检测调平并监控车身的变形情况。


 备案号:
备案号:
