英硕双(多)丝杠同步驱动解决方案
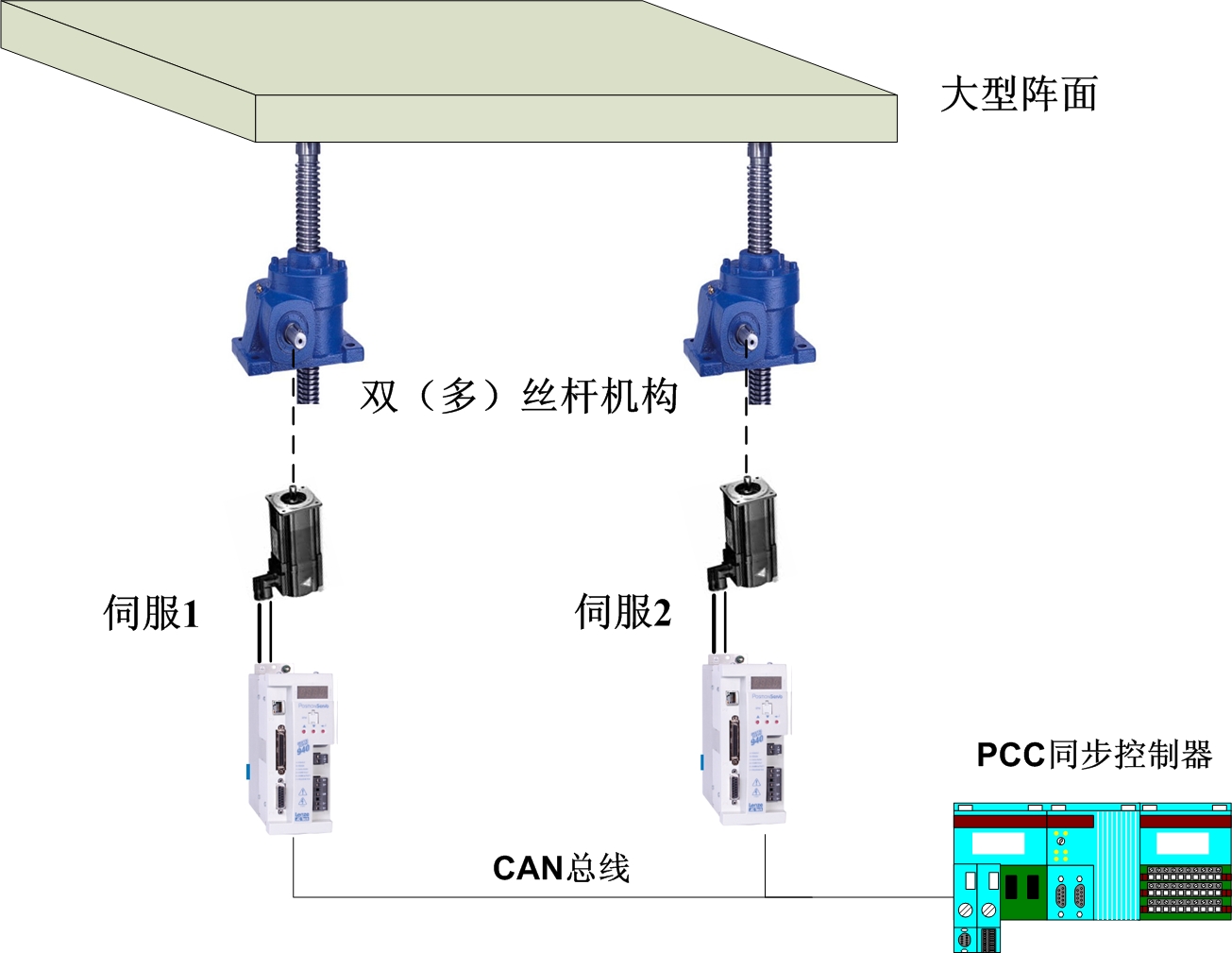
双(多)丝杠同步驱动大型部件的传动方案在机械设计中较为普遍,尤其在机动/高机动雷达天线的俯仰、折叠结构中非常常见,英硕的双(多)丝杠同步驱动方案基于双(多)伺服电机的驱动方案,可按照位置同步及负载均衡调配的要求,实现双(多丝杠)推动大型负载时多个电机之间的协同控制,由该方案组合起来的驱动系统具有如下显著特点:
1) 双(多)电机的运动完全采用电子耦合,相互间无需机械联结;
2) 系统可按位置同步或负载均衡调配两种方式,控制双(多)丝杠电机的运动;
3) 系统按位置同步和负载均衡方式工作时,均可适应系统结构本身固有的位置偏差和非对称性;
4) 系统根据负载状况及变化趋势,可智能化地控制双(多)电机的速度设定,实现负载的合理分配;
5) 系统可完成双(多)丝杠同步驱动负载的速度和位置(定位)控制;
6) 双(多)丝杠电机均采用CAN总线进行联控,各个电机驱动器具有完备详尽的实时信息监控;
系统结构如下图所示:












 备案号:
备案号:
