









多天线方位协同伺服控制系统(以下简称协同系统),是基于CAN和光纤网络搭建系统的,它由多台PCC控制器和监控触摸屏构成,可实现多台雷达天线的方位角度以同步跟踪等模式协同运转,保证多台雷达最大效率地覆盖目标空域,海域工作。
协同系统的硬件及网络结构如下图所示:
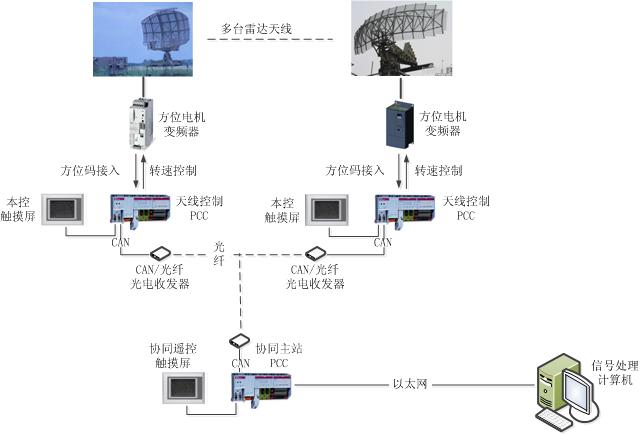
为了实现各部雷达天线的协同运转,本系统设置了一台协同主站PCC,同时为每台天线配置了一套天线控制PCC,为了便于实时监控和人机对话,每台PCC均设置了一套触摸屏界面,用于实时显示系统的工作状态,并可从主站PCC及其触摸屏上下达协同指令,系统工作模式包括如下几种:
1) 同步模式:指定任意一台天线作为基准参照,其他天线保持与之方位同步运转;
2) 顺序模式:制定任意一台天线作为基准参照,其他天线按照等方位夹角间距,成“队列式”运转;
3) 微动指向模式:制定任意一台天线以当前方位出发,做微动定位控制。
每台雷达天线的伺服系统配置有一套天线控制PCC,用于完成天线方位角度的采集和遥、本控,考虑到不同雷达天线原有的伺服部分变频器的差异性,我们采用了最通用的PCC模拟电压输出的方式,来实现方位电机的转速控制,同时,运用TPU的高速处理功能,巧妙的将天线的方位增量码接入PCC控制器(其频率最高可达200KHz),可自动对天线回转做双向可逆计数,实时获取精确的绝对方位信息。
针对协同主站下达的指令,天线控制PCC有选择的将其所控制的天线置为如下两种可能的工作模式:
1) 基准站:基准站为协同队列提供同步或顺序夹角运转的方位基准;
2) 从动站:从动站按当前下达的系统模式指令,参照基准站方位运转;该模式下,PCC运用PID调节算法,控制方位电机的转速,使其实时跟随系统设定的方位角度。
因距离原因,为保证协同系统管控数据的高效传输,本系统采用了光纤网络技术,将相隔距离数公里以上的两个雷达站的CAN网络调制到光纤上传输耦合,这样既保证了传输距离,又获得了较高的网络通信带宽。现场工作效果很好。
整个协同系统的核心―协同主站也由一套PCC和触摸屏构成,它负责接收用户的系统操作指令,并通过CAN/光纤网络,将指令下达到各个分站的天线控制PCC,同时,通过这一全局的网络,将各个分站天线的工作状态全部采集上来,显示到触摸屏上,包括,实时方位信息,电机转速信息,方位变频器的报警信息等。本控模式下,协同指令可以由触摸屏选择设定,并交由主站PCC经CAN/光纤网络下达;遥控方式下,通过以太网和主站PCC相连的的信号处理计算机可以通过局域网下达协同指令,交由主站PCC经CAN/光纤网络下达至各个分站PCC控制执行。
该系统为国内首创研制,投入使用以来,受到用户单位的一致好评。


 备案号:
备案号:
