









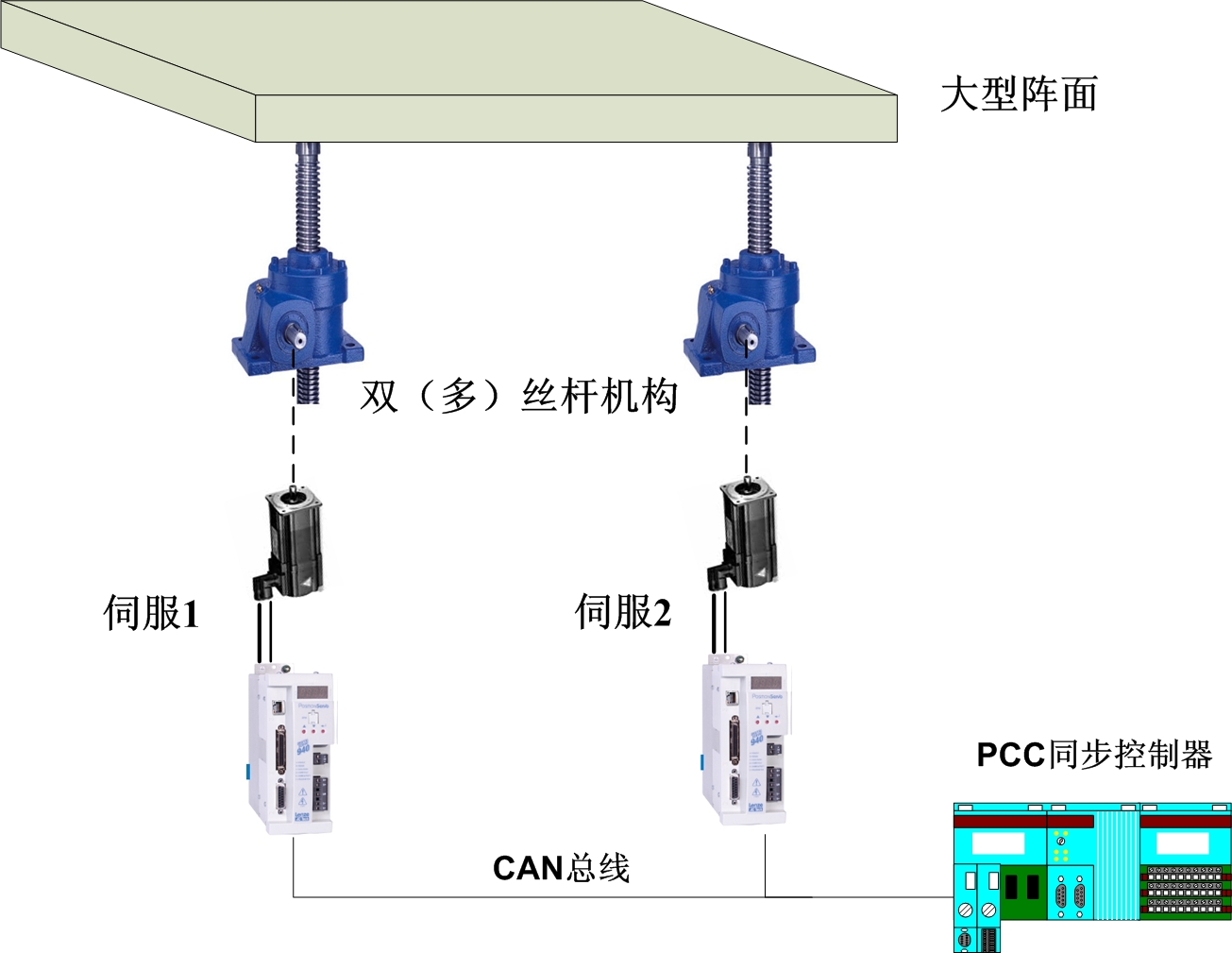
英硕于2009年3月完成了双(多)丝杠驱动标准解决方案套件的实际测试,并成功运用于某雷达产品的折叠机构上,取得了十分理想的工作效果。
1)该系统可按位置同步及负载均衡策略对双(多)丝杠驱动电机进行动态控制;
2)驱动软件可根据双(多)丝杠电机的负载状态及变化趋势,对双(多)电机速度作出合理的速度给定控制;
3)该套件可适用与两条或多台电机推动负载的情况,并且可自适应结构本身所固有的偏差和非对称性。
4)控制和电机驱动系统完全基于CAN总线架构
5)增加负载位移传感器(如绝对式编码器),不仅可以完成机构的运动速度控制,还可以完成精确的定位控制。
相关新闻


 备案号:
备案号:
